
Palestras sobre diversos temas por CSIRO/Austrália
Trilha de PD&I
Local: Novotel, Sala Cupuaçu
Horário: 11:00 – 12:40
Wireless Communication Tutorial – by Hajime Suzuki (CSIRO)

In this talk, we first review the basics of how electromagnetic waves (radio) convey digital information from a transmitter to a receiver wirelessly via radio propagating medium including air, water, and vegetation. We consider how radio waves are attenuated, reflected, refracted, and diffracted over radio propagation paths, so as to be able to predict the radio characteristics and signal strength at a receiver in a given radio environment. We cover standard methods of modelling radio propagation recommended by the International Telecommunication Union (ITU). We then move to overview advanced wireless communication technologies including the use of multiple antennas to enhance spectral efficiency (how much information can be sent within given frequency bandwidth) as well as reliability (technology commonly known as multiple input multiple output, MIMO), software defined radio (radio hardware that can modify its radio transmission and reception methods by software update), and cognitive radio (radio hardware that can sense radio environment and adopt its transmission accordingly). Finally, some of CSIRO’s wireless communication research development efforts are introduced including high spectral efficiency point-to-multi-point wireless access in remote areas, 10 Gbps 50 km point-to-point wireless backhaul in remote areas, and wireless localisation (ability to accurately locate moving radio nodes) in mining environment.
Perception for Robotics – by Dr. Stefan Hrabar (CSIRO)
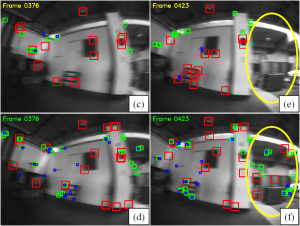
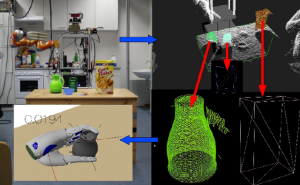 In this talk I will give an overview of the common perception techniques used in robotics, with an emphasis on computer vision. I will present examples of how computer vision has been used by the CSIRO Autonomous Systems Lab in their robotics applications.
In this talk I will give an overview of the common perception techniques used in robotics, with an emphasis on computer vision. I will present examples of how computer vision has been used by the CSIRO Autonomous Systems Lab in their robotics applications.
SLAM, Zebedee and Hovermap – by Dr Stefan Hrabar (CSIRO)
 In this talk I will present the (SLAM) research conducted at the CSIRO Autonomous Systems Lab. This will include a brief overview of SLAM theory and description of the ASL SLAM implementation. I will present Zebedee, the handheld 3D mapping device we have developed which uses our SLAM algorithm. I will also present Hovermap, a 3D lidar mapping for UAVs which also uses our SLAM algorithms. I will present sample data and discuss the pros and cons of lidar-based aerial mapping over photogrammetric-based mapping.
In this talk I will present the (SLAM) research conducted at the CSIRO Autonomous Systems Lab. This will include a brief overview of SLAM theory and description of the ASL SLAM implementation. I will present Zebedee, the handheld 3D mapping device we have developed which uses our SLAM algorithm. I will also present Hovermap, a 3D lidar mapping for UAVs which also uses our SLAM algorithms. I will present sample data and discuss the pros and cons of lidar-based aerial mapping over photogrammetric-based mapping.
UAV Research at CSIRO – by Dr. Stefan Hrabar (CSIRO)

In this talk I will present the UAV–related research which has been conducted at the CSIRO from 1999 to present. I will present case studies on how our research has been applied to real-world applications including beyond line-of-sight infrastructure inspection, agricultural remote sensing, and conducting surveys for invasive weed species in the rain forests of Northern Queensland.